Teaching
Our interest is to teach students on complex autonomous systems. Currently there are no regular courses, but we plan some seminars in the future. See the open topics page for topics for bachelor and master thesis or a Forschungsprojekt.
Past teaching courses:
Lab Course “Robotik und visuelle Sensorik”, VSI, SS 2013
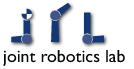
This course introduces to applied robotics and image processing. Get in touch with cutting-edge technology, e.g. the humanoid robot Nao.
- working with mobile robots: remote control, motor controller, or pose estimation
- applied image processing in robotics and/or humanoid robots
- working with sonarsensors
- detecting forms in images using the hough transform
- position estimation from images using SURF and SIFT technics

Lab Course “Robotik und visuelle Sensorik”, VSI, SS 2011
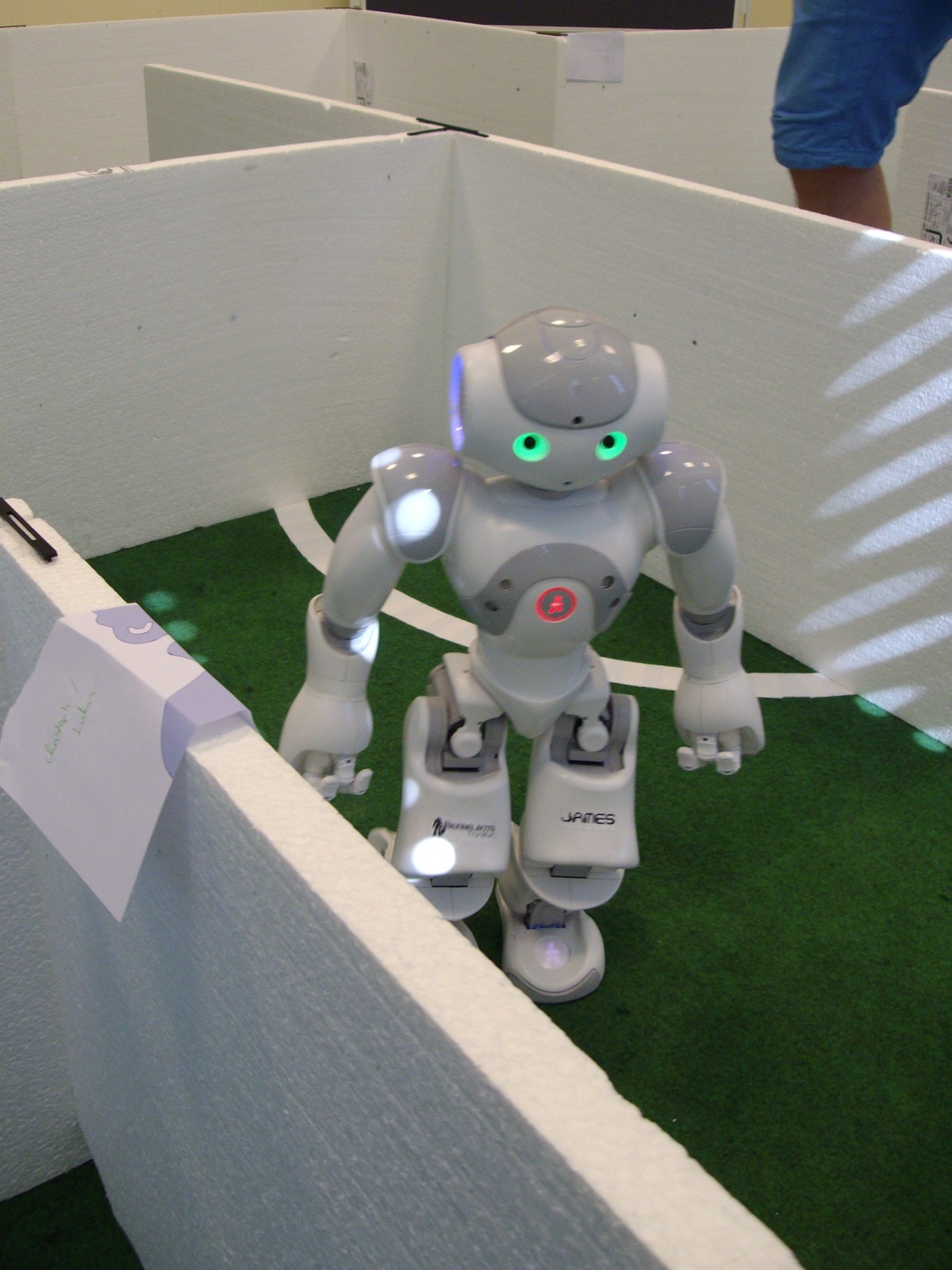
This course introduces to applied robotics and image processing. Get in touch with cutting-edge technology, e.g. the humanoid robot Nao or the Kinect 3D-camera.

- working with mobile robots: remote control, motor controller, or pose estimation
- applied image processing in robotics and/or humanoid robots: choosing a project like motion capturing with a 3D-camera, 3D remote control, face tracking, playing robot soccer, etc.
To get an impression what you can do, see the Kinect video or the ball following video.
Materials:
Lab Course “Robotik und visuelle Sensorik”, VSI, SS 2010
This course introduces to applied robotics (this time with our humanoid robots!) and image processing.
- working with mobile robots: remote control, motor controller, pose estimation
- working with wheel-based and humanoid robots
- applied image processing in robotics: playing robot soccer

Lab Course “Robotik und visuelle Sensorik”, VSI, SS 2008 & 2009
This course introduces to applied robotics and image processing.
- working with mobile robots: line follower, motor controller, pose estimation, sensor based exploration
- working with a robotic arm
- applied image processing in robotics: playing the “robot sumo”

This is a joint course with the Computer Graphics group to teach mixed reality applications. In WS 2008/09 we implemented the classical Pacman game.
- real robots move in a game field; an image processing system detects robot positions using a camera
- game logic is provided by a game server
- game clients provide a virtual reality view of the game

Lab Course “Analoge Schaltungen der Informationsverarbeitung”, EM, SS 2008
By offering hands-on practice with up-to-date hardware and software,
this laboratory gives the students the opportunity to deepen
their understanding of the design and implementation of electronic
circuits. The experiments cover the following aspects.
- modeling, simulation, verification and synthesis of digital and analog circuits
- design and implementation of analog/digital converters
- basics of embedded systems

Lab Course “Simulation autonomer Systeme”, IS, SS 2008
This course focuses on developing an autonomous agent for a simulated
board game.
- simulation and implementation of the RoboRally board game
- different agent behavior inspired by Artificial Intelligence techniques
- trading of movement cards
- shortest path search to find best way through the map
- opponent modeling to predict next position
- challenge aspect of competing robots

![]()