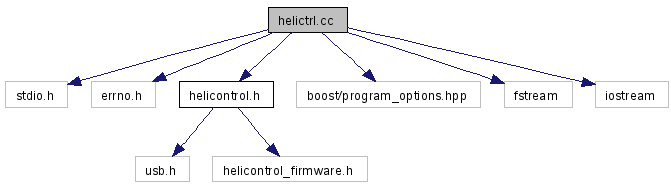
#include <stdio.h>
#include <errno.h>
#include <helicontrol.h>
#include <boost/program_options.hpp>
#include <fstream>
#include <iostream>
Go to the source code of this file.
Defines | |
| #define | bound(min, num, max) ((num) >= (min) ? ((num) < (max) ? (num) : (max)) : (min)) |
| #define | MODE_NORMAL 0 |
| #define | MODE_STOP 2 |
Functions | |
| static void | send_frame (char protocol, char channel, char throttle, char trim, char yaw, char pitch, char special) |
| int | main (int argc, char **argv) |
Variables | |
| struct usb_dev_handle * | handle |
It implements a simple remote control, similar to demo_sdl.c in ../demo_sdl, but without! joystick support. helictrl uses the boost library for command line parsing, thus requires a c++ compiler.
Definition in file helictrl.cc.
| #define bound | ( | min, | |||
| num, | |||||
| max | ) | ((num) >= (min) ? ((num) < (max) ? (num) : (max)) : (min)) |
Definition at line 41 of file helictrl.cc.
| #define MODE_NORMAL 0 |
Definition at line 45 of file helictrl.cc.
| #define MODE_STOP 2 |
Definition at line 46 of file helictrl.cc.
| int main | ( | int | argc, | |
| char ** | argv | |||
| ) |
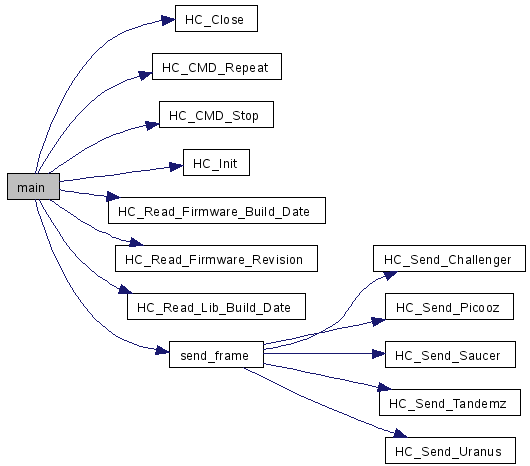
Definition at line 83 of file helictrl.cc.
References handle, HC_Close(), HC_CMD_Repeat(), HC_CMD_Stop(), HC_Init(), HC_Read_Firmware_Build_Date(), HC_Read_Firmware_Revision(), HC_Read_Lib_Build_Date(), MODE_NORMAL, MODE_STOP, and send_frame().
| static void send_frame | ( | char | protocol, | |
| char | channel, | |||
| char | throttle, | |||
| char | trim, | |||
| char | yaw, | |||
| char | pitch, | |||
| char | special | |||
| ) | [static] |
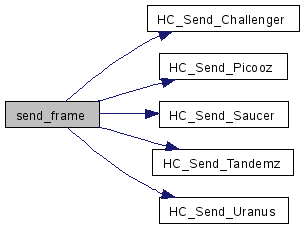
Definition at line 51 of file helictrl.cc.
References bound, handle, HC_Send_Challenger(), HC_Send_Picooz(), HC_Send_Saucer(), HC_Send_Tandemz(), and HC_Send_Uranus().
| struct usb_dev_handle* handle |
Definition at line 49 of file helictrl.cc.
 1.5.3
1.5.3